Table Bot Challenge
For this challenge we had to create a program that used a touch sensor to keep our robot from falling off the table for a minute. This was easily achieved because the program was given to us in the introduction of some new program options.
Table Bot
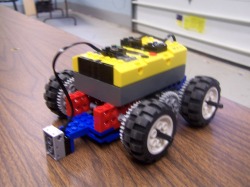
After we recreated the program given we started working at the design for our robot. We made our own modification of the designs given. The touch sensor was put in the front of the robot just touching the table so that when our robot went off the table the program would have our robot go into reverse. We accomplished this by using a timer fork which allowed two different programs the act when the sensor was pushed in or out. After the timer fork we had a landing pad and a jump pad at the end so the program could recycle itself.
| 100_1818.mov | |
| File Size: | 4522 kb |
| File Type: | mov |
