Tug of War
The Tug of War challenge had my partner Greg and I to create a contraption that could pull the opponents car across a line that was drawn on the table. Each robot had to have a string connected to it with a paperclip on it to attach each bot. The only restrictions that we had was we could only use two motors, had to have a touch sensor program and had to be run on AC power to keep everything even.
1st Prototype

Our first design used a small gear connected to a large gear to give the robot an increased torque without destroying of its speed. We created a gear line from the back wheels to the front wheels to give the robot four wheel drive so that our robot had increased power. Our robot was undefeated for a while until another group created a robot with a much greater torque that caused our defeat but lead us to design our next design.
ROBO-DIESEL

With the defeat of our last robot we began to rebuild. Our new design completely got rid out our speed but gave our robot an insane amount of torque. The way we increased our torque was by creating a complex gear design. We also bulked up our robot so it couldn’t be pulled so easy by other tough robots. These new modifications lead us to being the champions of our class.
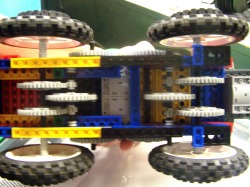
This is a picture of our complex gear design hidden in the underbelly of our robot.
